Project Description
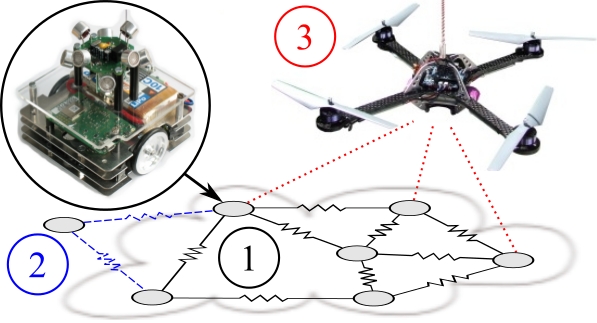
Wireless Sensor and Actor Networks (WSANs) consisting of mobile and fully autonomous nodes are meant to operate in known as well as in unknown environments. The lack of position information to coordinate sensor and actor nodes in unknown environments is still a challenging task. A large variety of WSANs applications rely on accurate position information and can not operate unless nodes know where they are. It is therefore essential to provide sensors with this knowledge, typically by the usage of a localization system. Because of the limited availability in indoor environments and the potentially too low accuracy, GPS can not always be used, requiring the usage of a Local Positioning System (LPS). These systems have attracted the attention of many research groups, however, there is still no commonly accepted system available. The greatest challenge for a general purpose LPS is its autonomous initialization or bootstrapping in unknown environments. Furthermore, to not limit the range of applications, manual interaction or the existence of a central processing unit can not be assumed. Other important features are scalability, the ability to continuously adapt to changing environments, and the independence from a priori knowledge. None of the existing solutions fully feature all of these properties. We therefore developed the Autonomous Localization Framework (ALF) that provides localization support for truly self-organizing and distributed systems without relying on global knowledge. Based on simple distance measurements and radio communication, mobile ground robots strategically distribute themselves in a potentially unknown environment to subsequently form a reference grid in a fully decentralized and distributed manner. This reference grid can be seen as a global coordinate system enabling nodes to determine their position in relation to all other nodes. Our system clearly outperforms related approaches in terms of scalability, robustness, and accuracy. Furthermore, it is completely hardware independent and considers timing constraints. To backup these claims we showed that our system can enable the autonomous flight of a quadrotor based on positions obtained by ALF.
Project Period
- 2008-06-01 – 2012-12-31
Project Members
-
Dr.-Ing. Jürgen Eckert
Prof. Dr.-Ing. Reinhard German
Prof. Dr.-Ing. Falko Dressler
Related Publications
-
- , “On Autonomous Indoor Flights: High-Quality Real-Time Localization using Low-Cost,” Proceedings of IEEE International Conference on Communications (ICC 2012), IEEE Workshop on Wireless Sensor Actor and Actuator Networks (WiSAAN 2012), Ottawa, Canada, pp. 7093-7098, June 2012
- , “On the Feasibility of Mass-Spring-Relaxation for Simple Self-Deployment,” Proceedings of 8th IEEE/ACM International Conference on Distributed Computing in Sensor Systems (DCOSS 2012), Hangzhou, China, pp. 203-208, May 2012
- , “Autonomous Localization Framework for Sensor and Actor Networks,” Erlangen, 2012
- , “Distributed Mass-Spring-Relaxation for Anchor-free Self-localization in Sensor and Actor Networks,” Proceedings of 20th IEEE International Conference on Computer Communication Networks (ICCCN 2011), Maui, HI, pp. 1-8, August 2011
- , “ALF: An Autonomous Localization Framework for Self-Localization in Indoor Environments,” Proceedings of 7th IEEE/ACM International Conference on Distributed Computing in Sensor Systems (DCOSS 2011), Barcelona, Spain, pp. 1-8, June 2011
- , “Considerations on Quality Metrics for Self-localization Algorithms,” Proceedings of 5th IEEE/IFIP International Workshop on Self-Organizing Systems (IWSOS 2011), Karlsruhe, Germany, pp. 104-115, February 2011
- , “An Indoor Localization Framework for Four-rotor Flying Robots Using Low-power Sensor Nodes,” in IEEE Transactions on Instrumentation and Measurement vol. 60 (2), pp. 336-344, 2011
- , “A Self-Organizing Localization Reference Grid,” Proceedings of 16th ACM International Conference on Mobile Computing and Networking (MobiCom 2010), Poster Session, Chicago, IL, pp. 1-3, September 2010
- , “A Self-Organizing Localization Reference Grid,” in ACM SIGMOBILE Mobile Computing and Communications Review vol. 14 (3), pp. 4-6, 2010
- , “Real-time Indoor Localization Support for Four-rotor Flying Robots using Sensor Nodes,” Proceedings of IEEE International Workshop on Robotic and Sensors Environments (ROSE 2009), Lecco, Italy, pp. 23-28, November 2009
- , “Self-localization Capable Mobile Sensor Nodes,” Proceedings of IEEE International Conference on Technologies for Practical Robot Applications (TePRA 2009), Woburn, MA, USA, pp. 224-229, November 2009